Portal tecnológico
Cámaras, software y sistemas de escaneo de línea de rendimiento para aplicaciones de inteligencia artificial y aprendizaje automático
Cámaras de escaneo lineal

Para escaneo de línea, los productos van desde 4K @ 172KHz hasta 16K @ 400KHz con un guiño especial a 9K TDI @ 600KHz.
Completo destacado
4K hasta 16K
Tarifas de línea más altas posibles
es decir. 4K @ 172KHz, 16K @ 400KHz
Soporte de codificador
TDI
10 Gigas, 25 Gigas, 100 Gigas
¡Disponible ahora o próximamente!
Emergente cámaras de escaneo lineal son más conocidos por cubrir una gama extremadamente amplia de resoluciones y velocidades de línea. Incorporamos los mejores sensores de Gpixel. Gpixel cuenta con una alta calidad de imagen con resoluciones y velocidades de línea que llevan la serie Emergent 100GigE Pinnacle al límite. Los modelos emergentes 25GigE Accel y 10GigE Pace completan muy bien la cartera de productos de escaneo de línea. Las cámaras Eros 5GigE se unirán a la línea en 2024 con modelos de menor resolución como 2K y 4K.

Figura: Cámaras emergentes de exploración de línea (100 GigE Pinnacle, 25 GigE Accel, 10 GigE Pace)
Esta animación ilustra la misma tarea con una cámara de exploración lineal. Por lo general, las cámaras de escaneo lineal se utilizan para escanear una red continua de material, como estampados o telas, pero no excluyen aplicaciones como las que se muestran aquí con objetos discretos. Las imágenes de las cámaras aquí son hardware activado por el sensor que busca objetos en el transportador. Las líneas individuales de un cuadro determinado se activan de forma síncrona mediante el uso de la señal del codificador continuo que se muestra en verde. Las líneas de una imagen determinada se transmiten inmediatamente a la computadora y se ensamblan en el búfer del usuario con tecnología de copia cero. Las cámaras Emergent Line Scan tienen entradas de codificador RS422 A/B, 1 entrada de disparo y 2 salidas.
Las cámaras de escaneo de línea TDI se utilizan para exponer la misma línea.
sobre el objeto varias veces para permitir velocidades más altas
con la misma iluminación o la misma velocidad con menor requisito de brillo de iluminación. TDI logra esto al tener múltiples líneas en el sensor, cada línea se expone varias veces y la exposición o velocidad de la línea está perfectamente sincronizada con el movimiento del transportador mediante el uso del codificador.
E/S de escaneo de línea

El conector IO de las cámaras, que es un conector de 12 pines que presenta entradas de codificador de cuadratura diferencial, así como otras entradas y salidas de uso general.
Opciones de activación
Aquí vemos el diagrama de bloques general de las opciones de disparo de las cámaras de escaneo lineal. Se admiten muchos modos que varían desde activación interna completa hasta activación basada en codificador completo para una sincronización precisa con sistemas transportadores en movimiento.

MODO A – Todos los disparos internos
- Parámetro LineTime para controlar el inicio de cada línea.
- Parámetro FrameRate para controlar el inicio de cada cuadro.
- Parámetro FR_LT_Sync para ajustar automáticamente LineTime según FrameRate.
MODO B – Disparador de marco externo
- Parámetro LineTime para controlar el inicio de cada línea.
- Disparador de hardware para controlar el inicio de cada cuadro.
MODO C – Disparador de cuadro externo, disparador de tiempo de línea del codificador
- Codificador para controlar el inicio de cada línea.
- Disparador de hardware para controlar el inicio de cada cuadro.
MODO D – Disparador de marco de codificador, disparador de tiempo de línea de codificador
- Codificador para controlar el inicio de cada línea.
- Codificador para controlar el inicio de cada cuadro.
MODO E – Máscara/pulso de disparo externo, disparador de tiempo de línea del codificador
- Codificador para controlar el inicio de cada línea.
- Pulso de entrada de hardware para habilitar/enmascarar línea/generación de cuadros.
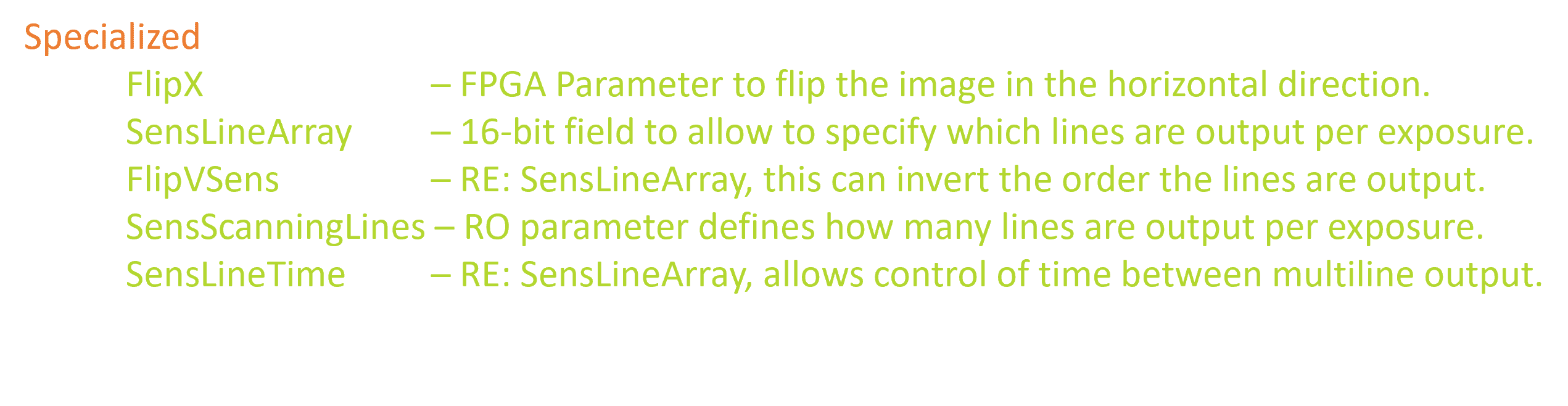
Parámetros de escaneo de línea

Aquí vemos el subconjunto de parámetros de cámara específicos para el funcionamiento de la cámara de escaneo lineal que se dividen en categorías como: Propósito general, Calibración de imagen, Calibración de color, Control de disparo externo, Control de codificador, Estadísticas de codificador y Especializado.
Corrección FPN oscuro/iluminado

Un escaneo de línea fundamental es la calibración FPN oscuro e iluminado, que se incluye en nuestra categoría de calibración de imagen. A la izquierda vemos imágenes oscuras (contraste mejorado) antes y después de la calibración FPN oscura. A la derecha vemos imágenes iluminadas antes y después de la calibración FPN iluminada. Los gráficos mostrados ilustran los promedios de las columnas que resaltan la excelente corrección que realiza la cámara con un solo clic. Las curvas de calibración se pueden guardar y cargar para eliminar la necesidad de recalibrar al encender el sistema.
Modo D – Entrada de codificador

Nuestras cámaras de escaneo de línea admiten entradas de codificador de cuadratura A y B que permiten que el firmware de la cámara detecte movimiento hacia adelante y hacia atrás mediante el seguimiento de las cuatro fases del codificador. Con el Modo D configurado como se muestra, podemos configurar el parámetro GP_ENCODER_DIRECTION para permitir el filtrado solo de pulsos hacia adelante o hacia atrás.
MODO D – Configuración
- Modo de disparo = activado
- Fuente de activación = Hardware
- GP_ENC_MODE = Activado
- GP_ENC_TERMINATION = Desactivado/Activado
- GP_ENC_DIRECTION = Avance/Retroceso
- GPI_Start_Frame_Mode = N/A
- GPI_Start_Frame_Event = Encoder_Frame_Divider

Modo D – Codificador

Las características adicionales del codificador del firmware de la cámara incluyen un multiplicador de pulso del codificador y un divisor de pulso del codificador que se utilizan para sincronizar el movimiento del material con los activadores de línea que pueden variar según el modelo del codificador y la ampliación, por ejemplo. También proporcionamos contadores estadísticos para permitir a los integradores de sistemas validar los disparadores posteriores al multiplicador y divisor para verificar la tasa de disparo y las características de fluctuación.
Modo D – Ejercicio de divisor de codificador

Un ejercicio fundamental en los sistemas de escaneo lineal es configurar la velocidad de escaneo para crear la relación de aspecto correcta del píxel.
En el Modo A, que es un método de activación totalmente interno, usamos el parámetro LineTime y simplemente ajustamos el tiempo de línea hasta que se observe la relación de aspecto de altura y ancho aproximadamente correcta; por supuesto, también podemos calcular esto.
Tenga en cuenta que este parámetro LineTime no rastrea los cambios en la velocidad del material, por lo que el usuario debe encargarse de esto si desea tener las proporciones correctas de la imagen. En el Modo D, que es un método de activación de todos los codificadores, debemos configurar el divisor del codificador en el valor apropiado para corregir las proporciones de la imagen. Este método es popular ya que rastrea la velocidad del material sin ningún ajuste de tiempo de ejecución.
Modo D – Corrección espacial

A diferencia de los sensores de escaneo de área de color que normalmente utilizan un patrón de bayer ajustado de 2 × 2 y un proceso de desbayer que implica aproximación mediante interpolación, los sensores de escaneo de línea de color como el que se muestra aquí tienen una separación mucho mayor en los canales rojo, verde y azul. Cada ciclo del codificador genera una exposición para todos los píxeles R,G,B en el mismo instante, pero estos píxeles miran diferentes partes del material. Necesitamos amortiguar las líneas rojas y esperar 4 ciclos del codificador antes de la exposición verde del mismo punto del material. De manera similar, esperamos 4 ciclos del codificador más antes de la exposición azul del mismo punto en el material antes de generar finalmente un píxel RGB completo.
Parámetros especializados
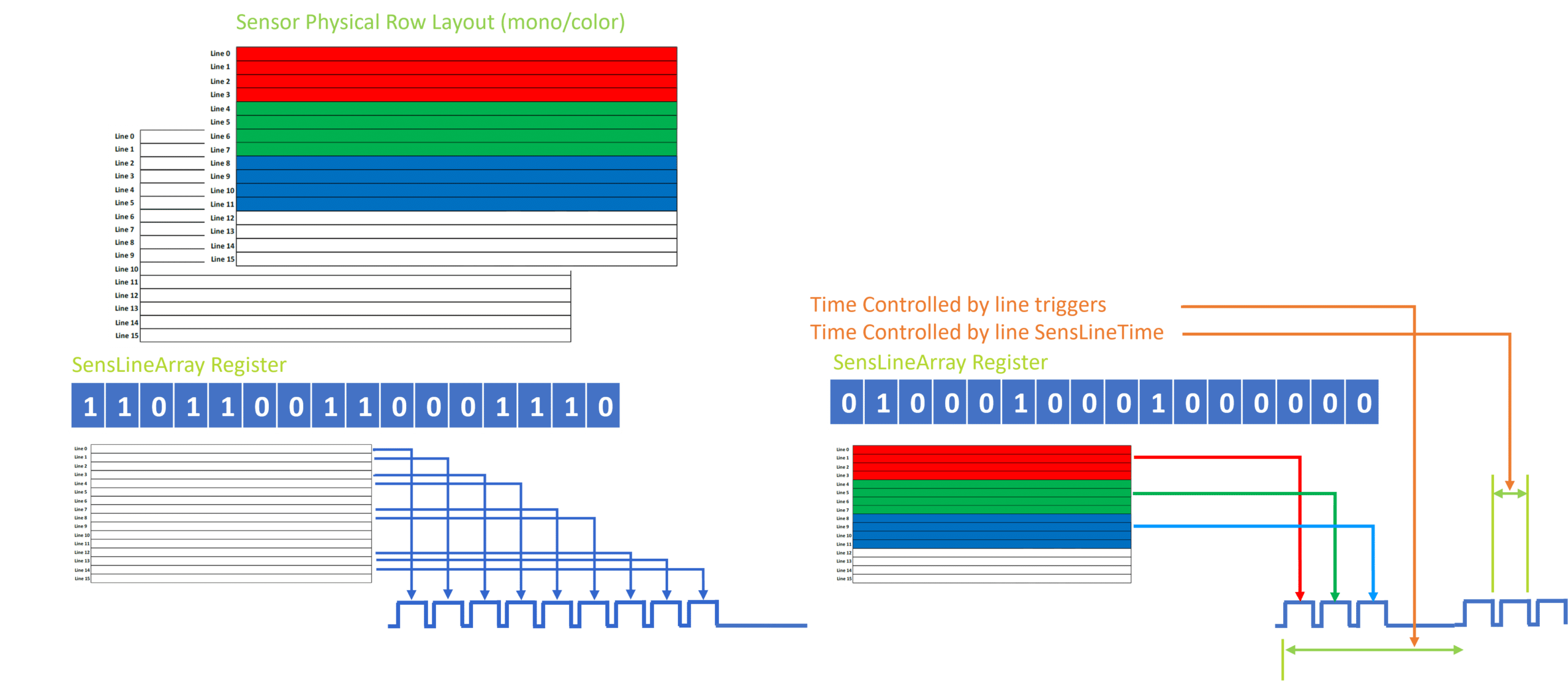
El sensor de escaneo de línea GPixel GL5016 16K 5um 400KHz que enviamos en la cámara de escaneo de línea Emergent Pinnacle LZ-16KG5 100GigE tiene capacidades especiales para generar filas arbitrarias del sensor de 16 filas para operaciones especializadas. Más comúnmente, esto se usa para imágenes en color, como se muestra a la derecha, donde tomamos 1 línea roja, 1 verde y 1 azul y luego empleamos la corrección espacial como se mostró anteriormente, además de emplear la calibración del color utilizando las funciones de matriz de corrección de color y balance de blancos de la cámara. para crear el mejor escaneo de imágenes en color de su clase. Observamos que con esta operación trilineal no hay aproximación mediante interpolación como en las cámaras Bayer de escaneo de área de color por lo que la reproducción del color es óptima.
Acerca de las tecnologías de visión emergentes
Aquí hay un resumen de lo que se trata Emergent...
- Más de 10 premios por innovación y pionerismo en el movimiento de imágenes GigEVision de alta velocidad
- 10+ años de envío 10GigE cámaras con más de 140 modelos
- 5+ años de envío 25GigE cámaras con más de 55 modelos
- 2+ años de envío 100GigE cámaras con más de 16 modelos
- Líder en rendimiento de tecnología de cámaras
- Enfocado en Ethernet/GigEVision de alta velocidad
- Enfocado en permitir el procesamiento de datos de imagen de alta velocidad
- Escaneo de área y Escaneo de línea modelos
- Modelos UV, NIR, Polarizados, Color, Mono para aplicaciones multiespectrales
- eSDK emergente para una flexibilidad total de aplicaciones
- Emergente ecaptura profesional para una solución de software muy completa
- La gama más completa de productos y soporte para aplicaciones de imágenes de alta velocidad
- Cualquier velocidad, cualquier resolución, cualquier longitud de cable
- ¡Disponible ahora!
Somos una empresa galardonada con múltiples premios que se enfoca en productos GigEVision de alta velocidad.
Tenemos muchos años enviando productos que varían en velocidades desde 10GigE hasta 100GigE.
Tenemos un fuerte enfoque en proporcionar tecnologías de extremo a extremo y soporte para las aplicaciones de nuestros clientes.
Podemos satisfacer la mayoría de las necesidades de las aplicaciones.
Por último, los productos presentados ya están disponibles.
Adopción de 10GigEVision y superior
Aquí hay una instantánea rápida de la adopción de productos GigEVision que varían en velocidades desde 10GigE hasta 100GigE. Emergent ha demostrado cómo se puede lograr el máximo rendimiento y abrió muchos mercados, incluida la visión artificial, para el uso de tales tecnologías. Algunas empresas ahora están aprovechando nuestros esfuerzos para lanzar productos de 25G y de mayor velocidad, pero aún queda mucho camino por recorrer para lanzar productos ratificados y de rendimiento.

Figura: Emergent Vision Technologies es el primer proveedor de cámaras basadas en interfaces 10GigE, 25GigE, 50GigE y 100GigE.