

应用领域

自动检测 > 手动检测
让我们从一个简单的单一汽车零件开始,该零件将自动检查表面缺陷:汽车前照灯透镜1。 在许多制造工厂中,操作员会对头灯进行手动检查,在特殊照明条件下检查头灯,寻找大于 0.5 毫米的缺陷。
与无瑕疵的镜片表面具有相同光学特性的缺陷将更难以检测。 图。 1
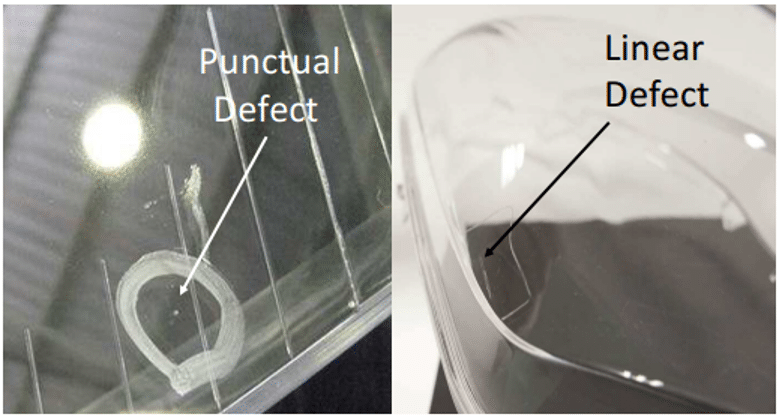
图。 1 此图显示了一些有缺陷的前照灯透镜(图片由参考文献 1 提供)
手动检查过程的主要缺点是投入的时间增加以及需要处理各种镜头型号。 为了在真实的工业生产环境中提高效率,制造商需要:
- 可靠地检测缺陷
- 指定时间段内实时巡检
- 适合不同镜头型号检测的系统
小型汽车零部件的机器视觉检测
为了确保对整个前照灯透镜进行检查,同时考虑最小缺陷尺寸和循环时间,机器视觉系统必须采用 多台相机。 例如,参考文献 1 中强调的检查系统有九个机器视觉相机,能够改变镜头相对于这些相机的姿态。
用于小型物品(尤其是具有金属反射表面的物品)的视觉引导机器人系统将提出具有挑战性的质量控制任务。 KArtridge 是小型汽车零部件的一个重要例子TM 空气制动联轴器。 这些接头连接车辆制动系统内的管子。 Kongsberg Automotive AS 拥有由复合材料、金属和橡胶制成的多材料产品联轴器。 这些联轴器中一个非常重要的部件是星形垫圈,它是一种通用金属件,可确保联轴器与其外壳之间的夹紧。
图。 2 显示了良好和有缺陷的星形垫圈的优秀示例。
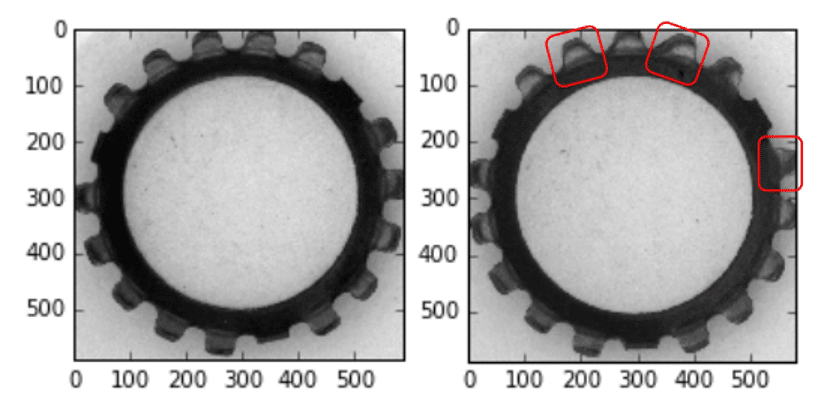
图。 2 此图展示了一个良好的星形垫圈(左侧)和一个有缺陷的星形垫圈(右侧),其中齿的几何形状存在各种缺陷。 (图片由参考文献 2 提供)
由于星形垫圈金属表面的自然反射率以及批次之间的颜色变化,机器视觉系统将面临挑战。此类组件的尺寸较小,使得相机和照明设置的零件检查变得棘手。
机器驱动的任务将是:
- 识别送料机构上的星形垫圈
- 星形垫圈方向的分类
- 分割星形垫圈的齿以进行近距离检查
汽车检查相机
Emergent Vision Technologies 拥有广泛的用于自动检查和分类的相机选项,包括 10GigE, 25GigE, 和 100GigE 相机经验 范围从 0.5MP 到 100MP+。 这些相机均具有高达 3462fps 的全 2.5MP 分辨率的一系列帧速率,以满足不同的成像需求。

某些机器视觉相机,例如远程直接内存访问 (RDMA) 相机,非常适合汽车零件检测。该技术使得数据能够在网络上的设备之间移动,而无需 CPU 参与每个数据包的参与。相机利用 GPUDirect技术 还可以将图像直接传输到 GPU 内存,这可以使用 Emergent eCapture Pro 软件。 部署该技术可实现零 CPU 利用率、零内存带宽成像和零数据丢失。
机器视觉系统单元架构
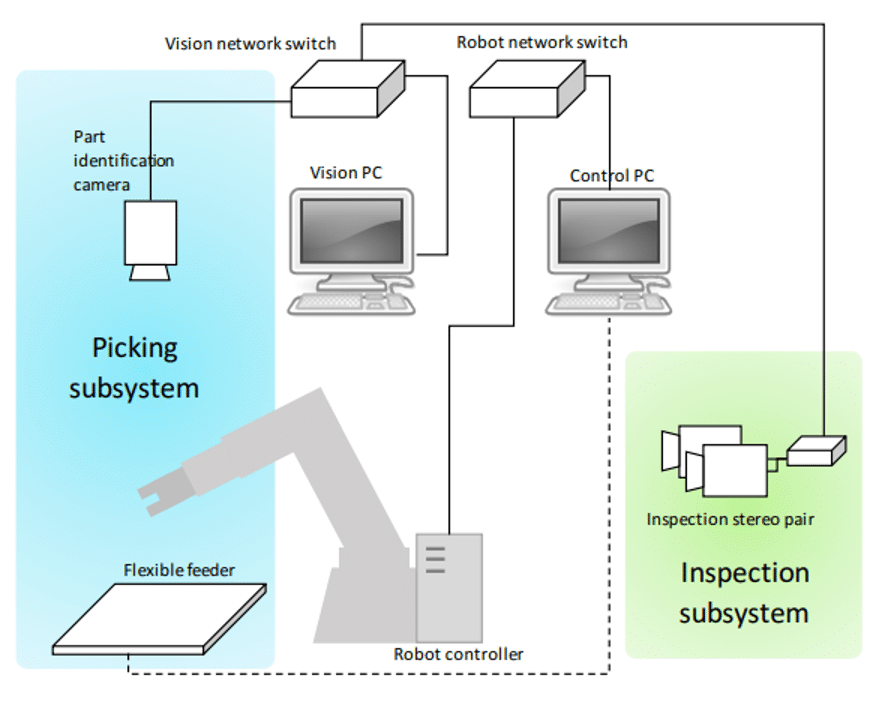
图。 3 此图显示了演示单元与 Adept Viper s850 机器人控制器的通信架构(图片由参考文献 2 提供)
对于零件拾取和操作, Adept Viper s850 机器人 为图 3 所示的系统选择了该系统。与机器人控制器的接口和机器人编程是通过单独的桌面环境实现的,Adept Desktop 版本 4.2.2.8 可以安装在专用 PC 上。 编程是使用专有的V+语言实现的。
部分进料是使用 任意馈送 SX240 灵活的供料器。该送料器设计用于随机送料零件,并且可以与用于位姿估计的视觉系统(a 计算机视觉 其目标是检测人(或在本例中为物体)的位置和方向的任务。馈线可以使用RS-232通信接口与外部系统进行通信。送料器的拾取表面还具有背光,这将进一步简化图像处理和零件识别。
GPUDIRECT:零数据丢失成像
Emergent 没有利用专有或点对点接口和图像采集板,而是使用 GigE视觉 标准和无处不在的以太网基础设施,可实现可靠、稳健的数据采集和传输,并具有一流的性能。 Emergent 部署了优化的 GigE Vision 实施方案,并支持 NVIDIA 等直接传输技术 GPU直连,它可以将图像直接传输到 GPU 内存。 该技术减轻了大数据传输对系统CPU和内存的影响,而是利用更强大的GPU能力进行数据处理,同时保持与GigE Vision标准的兼容性以及与兼容软件和外设的互操作性。

模式匹配
下面的视频展示了如何轻松地创建和原型化一种算法来执行高质量的模式匹配,而只需编写自定义 GPU Cuda 代码。
推理
下面的视频展示了如何轻松地添加和测试自己训练的推理模型来执行任意对象的检测和分类。 只需使用 PyTorch 或 TensorFlow 训练您的模型,并将其添加到您自己的 eCapture Pro 插件中。 然后实例化插件,连接到所需的相机并单击运行 - 没有比这更容易的了。
借助训练有素的模型,可以开发和部署推理应用程序 应急摄像机 在一台带有几个 GPU 的 PC 上使用 Emergent 的 GPUDirect 功能 – 没有人像 Emergent 那样开发高性能应用程序。
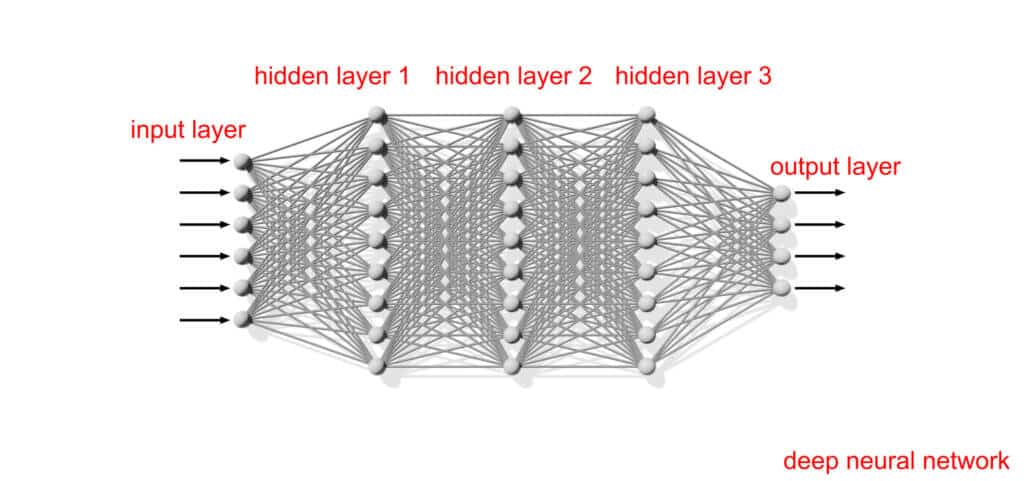
图4: 神经网络以人脑为模型,是机器学习的一个子集,是深度学习算法的核心,允许计算机根据训练示例学习执行特定任务。
偏振
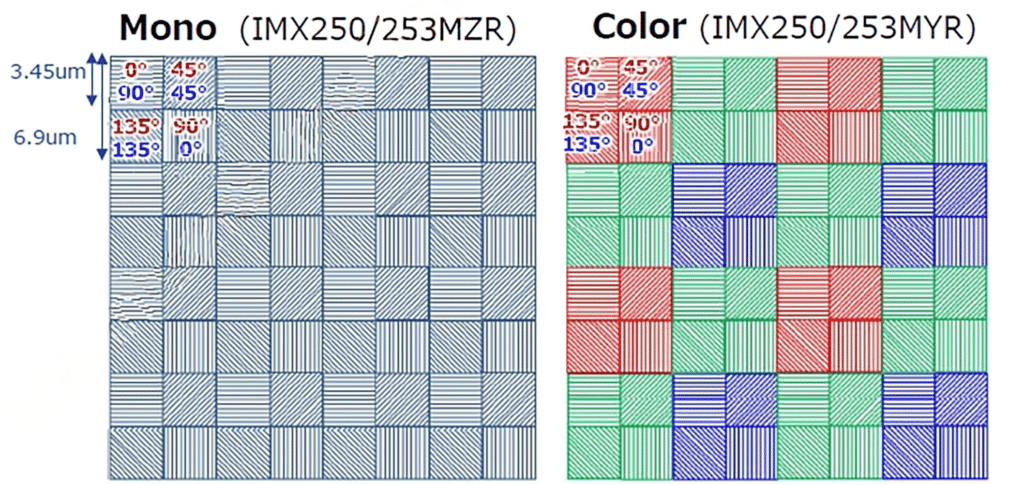
图5: 在 Sony PolarSens CMOS 偏振传感器中,每个镜头上的微型线栅偏振器在四像素组中具有 0°、45°、90° 和 135° 偏振角。
适用于零件检测应用的紧急 GIGE VISION 相机
| 型号 | 相机类型 | 分辨率 | 帧率 | 接口 | 传感器型号 | 像素大小 | |
|---|---|---|---|---|---|---|---|
|
HR-5000-SM | 黑白 | 5MP | 163fps | 10GigE SFP+ | Sony IMX250LLR | 3.45 × 3.45 µm |
|
|
HR-5000-SC | 彩色 | 5MP | 163fps | 10GigE SFP+ | Sony IMX250LQR | 3.45 × 3.45 µm |
|
|
HR-25000-SB-M | 黑白 | 24.47MP | 51fps | 10GigE SFP+ | Sony IMX530 | 2.74 ×2.74 μm |
|
|
HR-25000-SB-C | 彩色 | 24.47MP | 51fps | 10GigE SFP+ | Sony IMX530 | 2.74 ×2.74 μm |
|
HB-65000-GM | 黑白 | 65MP | 35fps | 25GigE SFP28 | Gpixel GMAX3265 | 3.2 × 3.2 µm |
|
|
HB-65000-GC | 彩色 | 65MP | 35fps | 25GigE SFP28 | Gpixel GMAX3265 | 3.2 × 3.2 µm |
如需其他相机选项,请查看我们的 交互式系统设计工具。