

自動車部品の検査と仕分けにマシンビジョンを導入
マシンビジョンシステム は、生産プロセスのほぼすべての側面で自動車業界に長年にわたり貢献し、品質管理の向上と製造プロセスの合理化を実現してきました。 自動車製造は非常にカスタマイズされた性質を持っているため、マシンビジョン検査システムは、単一のサブアセンブリ内のいくつかの異なるタイプの欠陥を発見できるように設計する必要があります。
マシンビジョンテクノロジーは、特に自動車製造検査プロセス全体で品質を保証する必要がある場合に、人による検査に比べて大きな利点をもたらします。 ペアリング マシンビジョンカメラ とロボットを使用したテクノロジーにより、位置が不確実で背景が複雑な場合でもコンポーネントを分類および検査できるシステムが作成されます。 そのような例の XNUMX つは、小型部品に特に適しており、専用のリグで近距離検査を行う、フレキシブル フィーダーからの視覚ガイド付き部品ピッキング プロセスにおけるマルチカメラ/マルチポーズ検査ステーションです。
アプリケーション

自動検査 > 手動検査
表面欠陥が自動的に検査される単純な単一の自動車部品、つまり自動車のヘッドランプ レンズから始めましょう。1。 多くの製造施設では、ヘッドランプはオペレーターによる手動検査を受け、特殊な照明条件下で検査され、0.5mm を超える欠陥がないか検査されます。
レンズの完璧な表面と同じ光学特性を持つ欠陥は、検出がより困難になります。 図1
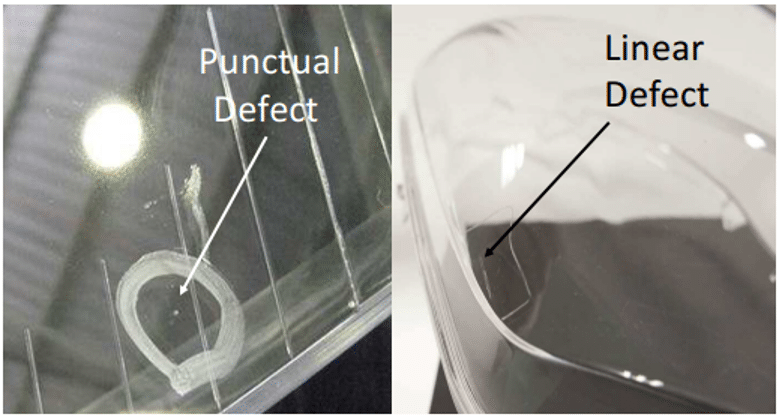
図1 この画像はいくつかの欠陥のあるヘッドランプ レンズを示しています (画像提供: 参考 1)
手動検査プロセスの主な欠点は、投資時間が増加することと、広範囲のレンズ モデルを処理する必要があることです。 実際の工業生産環境で効率を高めるには、メーカーには以下が必要です。
- 確実な欠陥検出
- 指定した期間内のリアルタイム検査
- 様々なレンズ機種の検査に対応できるシステム
小型自動車部品のマシンビジョン検査
最小の欠陥サイズとサイクルタイムを考慮しながら、ヘッドランプレンズ全体の検査を確実に行うには、マシンビジョンシステムで 複数のカメラ。 たとえば、参考文献 1 で取り上げられている検査システムには、XNUMX 台のマシン ビジョン カメラがあり、これらのカメラに対するレンズの姿勢を変更する機能を備えています。
小物品、特に金属反射面を備えた品物用の視覚誘導ロボット システムでは、品質管理が困難になります。 小型自動車部品の主要な例の XNUMX つは、KArtridge です。TM エアブレーキカップリング。 これらのカップリングは車両ブレーキ システム内のチューブを接続します。 Kongsberg Automotive AS は、複合材料、金属、ゴムで作られたマルチマテリアル製品カップリングを備えています。 これらのカップリングの非常に重要なコンポーネントはスター ワッシャーです。スター ワッシャーは、カップリングとそのハウジングの間のグリップを固定する汎用の金属片です。
図2 は、良好なスターワッシャーと欠陥のあるスターワッシャーの両方の優れた例を示しています。
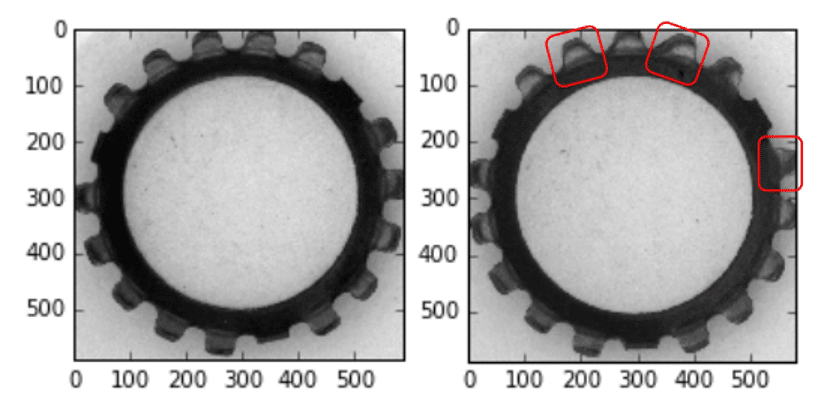
図2 この画像は、良好なスター ワッシャー (左側) と、歯の形状にさまざまな欠陥がある欠陥のあるスター ワッシャー (右側) を示しています。 (画像は参考資料 2 より)
マシン ビジョン システムでは、スター ワッシャーの金属表面の自然な反射率とバッチ間の色のばらつきにより、課題が発生します。この種のコンポーネントはサイズが小さいため、カメラや照明のセットアップの部品検査が難しくなります。
マシン主導のタスクは次のとおりです。
- フィーダー機構の星型ワッシャーの識別
- 星形座金の向きの分類
- 近距離で検査するためのスターワッシャーの歯の分割
自動車検査用カメラ
Emergent Vision Technologies は、自動検査と仕分けのための幅広いカメラ オプションを備えています。 10GigE, 25GigE、 および 100GigE カメラ 0.5MP から 100MP+ までの範囲。 これらのカメラはすべて、フル 3462MP 解像度で 2.5fps という高いフレーム レートを備えており、多様なイメージング ニーズに対応します。

リモート ダイレクト メモリ アクセス (RDMA) カメラなどの特定のマシン ビジョン カメラは、自動車部品の検査に非常に適しています。このテクノロジーにより、パケット単位で CPU を介さずにネットワーク上のデバイス間でデータを移動できるようになります。カメラの活用 GPUDirect テクノロジー また、画像を GPU メモリに直接転送することもできます。これは、次のコマンドを使用して実行できます。 緊急の eCapture Pro ソフトウェア。 このテクノロジーを導入すると、データ損失ゼロで CPU 使用率ゼロ、メモリ帯域幅ゼロのイメージングが実現します。
マシンビジョンシステムのセルアーキテクチャ
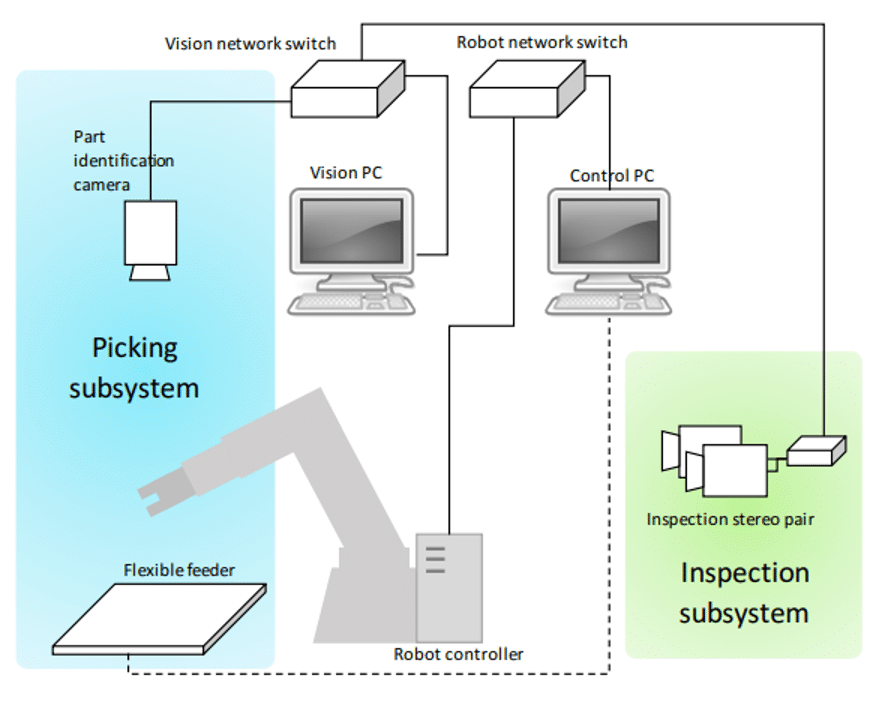
図3 この画像は、Adept Viper s850 ロボット コントローラーを備えたデモンストレーター セルの通信アーキテクチャを示しています (画像提供: 参考 2)
部品のピッキングと操作の場合、 Adept Viper s850 ロボット 図 3 に示すシステムには、ロボット コントローラーとのインターフェイスおよびロボット プログラミングが、専用の PC にインストールできる Adept Desktop バージョン 4.2.2.8 を使用した別のデスクトップ環境を介して実現されます。 プログラミングは独自の V+ 言語を使用して実現されます。
部品供給は エニフィードSX240 フレキシブルフィーダー。このフィーダーはパーツをランダムに供給するように設計されており、姿勢推定用のビジョン システムと組み合わせることができます ( コンピュータビジョン 人 (この場合は物体の) の位置と方向を検出することが目的のタスク)。フィーダは、RS-232 通信インターフェイスを使用して外部システムと通信できます。フィーダーのピッキング面にはバックライトも装備されており、画像処理と部品の識別がさらに簡素化されます。
GPUDIRECT: データ損失ゼロのイメージング
Emergent は、独自のインターフェイスやポイントツーポイント インターフェイスや画像取得ボードを利用する代わりに、 GigEビジョン 標準およびユビキタス イーサネット インフラストラクチャにより、信頼性が高く堅牢なデータ取得と転送を実現し、クラス最高のパフォーマンスを実現します。 Emergent は、最適化された GigE Vision 実装を展開し、NVIDIA のような直接転送テクノロジをサポートします。 GPUダイレクト、画像を GPU メモリに直接転送できるようになります。 このテクノロジーは、システムの CPU およびメモリに対する大規模なデータ転送の影響を軽減し、代わりに、より強力な GPU 機能をデータ処理に利用しながら、GigE Vision 標準との互換性および準拠ソフトウェアおよび周辺機器との相互運用性を維持します。

パターンマッチング
以下のビデオは、カスタム GPU Cuda コードを記述するだけで、高品質のパターン マッチングを実行するアルゴリズムをいかに簡単に作成およびプロトタイプできるかを示しています。
推論
以下のビデオは、独自のトレーニング済み推論モデルを簡単に追加およびテストして、任意のオブジェクトの検出と分類を実行できる方法を示しています。 PyTorch または TensorFlow を使用してモデルをトレーニングし、これを独自の eCapture Pro プラグインに追加するだけです。 次に、プラグインをインスタンス化し、目的のカメラに接続して、「実行」をクリックします。これほど簡単なことはありません。
十分にトレーニングされたモデルを使用すると、推論アプリケーションを開発し、さまざまな環境でデプロイできます。 緊急カメラ Emergent の GPUDirect 機能を使用して、XNUMX つの GPU を備えた XNUMX 台の PC 上で – Emergent のようなパフォーマンス アプリケーションを実行する人は誰もいません。
図4: 人間の脳をモデルにしたニューラル ネットワークは、深層学習アルゴリズムの中心となる機械学習のサブセットであり、コンピューターがトレーニング サンプルに基づいて特定のタスクの実行を学習できるようになります。
偏光
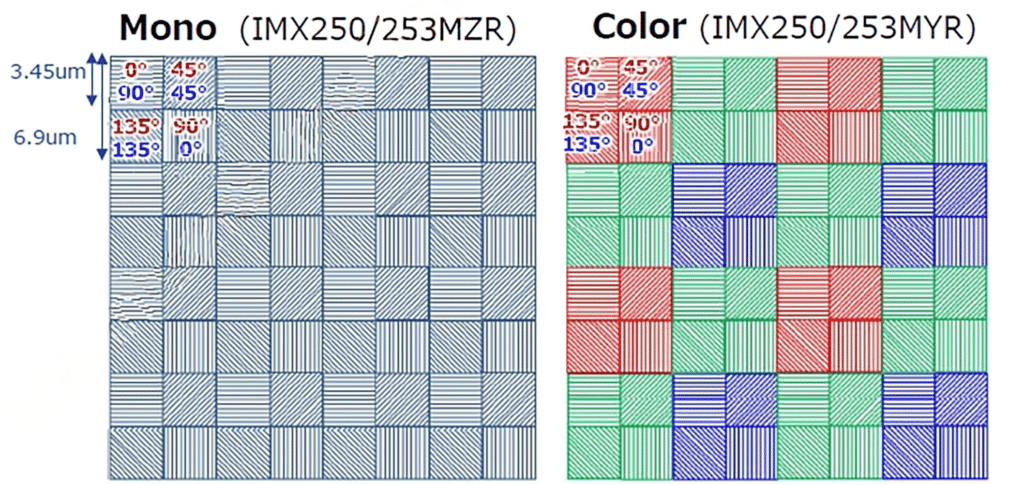
図5: Sony PolarSens CMOS 偏光センサーでは、すべてのレンズ上の小さなワイヤーグリッド偏光子が 0 ピクセル グループで 45°、90°、135°、XNUMX° の偏光角を持っています。
部品検査用途向けの緊急 GIGE ビジョン カメラ
| モデル | クロマ | 解像度 | フレームレート | インタフェース | センサー名 | 画素サイズ | |
|---|---|---|---|---|---|---|---|
|
HR-5000-SM | Mono | 5MP | 163fps | 10GigE SFP+ | ソニー IMX250LLR | 3.45×3.45μm |
|
|
HR-5000-SC | 色 | 5MP | 163fps | 10GigE SFP+ | ソニー IMX250LQR | 3.45×3.45μm |
|
|
HR-25000-SB-M | Mono | 24.47MP | 51fps | 10GigE SFP+ | ソニーIMX530 | 2.74×2.74μm |
|
|
HR-25000-SB-C | 色 | 24.47MP | 51fps | 10GigE SFP+ | ソニーIMX530 | 2.74×2.74μm |
|
HB-65000-GM | Mono | 65MP | 35fps | 25GigE SFP28 | ジーピクセル GMAX3265 | 3.2×3.2μm |
|
|
HB-65000-GC | 色 | 65MP | 35fps | 25GigE SFP28 | ジーピクセル GMAX3265 | 3.2×3.2μm |
追加のカメラオプションについては、こちらをご覧ください。 インタラクティブなシステムデザイナーツール。